Trajectory planning for nonholonomic mobile robots using affine geometry
Planning trajectories for nonholonomic systems is difficult and computationally expensive. When facing unexpected events, it may therefore be preferable to deform in some way the initially planned trajectory rather than to re-plan entirely a new one. A method based on affine transformations has been proposed to make such deformations. This method is exact and fast: the deformations and the resulting trajectories can be computed algebraically, in one step, and without any trajectory re-integration. Using this new method, it is possible to derive position correction, orientation correction, obstacle avoidance, feedback control and gap-filling algorithms for the general class of planar wheeled robots and for a tridimensional underwater vehicle.
Using affine deformation to correct the trajectory of a
car towing two trailers
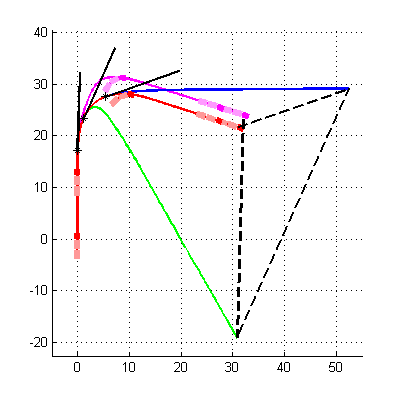
Filling a gap in a trajectory

References
- Q.-C. Pham. Affine trajectory correction for nonholonomic mobile robots (this is the full version of the RSS 2011 paper below; comments and suggestions welcome!) [Online]
- Q.-C. Pham. Fast trajectory correction for nonholonomic mobile robots using affine transformations (to be presented at RSS 2011) [Preprint]
Research propositions
If you are interested in developping this theory or in applying it to practical problems, send me an email and maybe we can start a collaboration. Undergrad or grad students from Todai are welcome, but it's also possible to collaborate at distance. Here are some examples of possible research topics:
- Controlling a differentially-driven four-wheeled
robot. We have here at the Nakamura-Takano laboratory a very
nice four-wheeled robot. The purpose is to study how affine
correction algorithms can be used on this system.

- Trajectory correction for skid-steering robots. So far the theory has been developped for mobile robots whose wheels are subject to the rolling-without-slipping constraint. How can the theory be adapted to robots whose wheels that actually slip?
- Smooth control of the end-point of robotic manipulators.
- Integrating the trajectory correction and gap-filling techniques into a probabilistic planner.